BFGS方法推导
可以构造一个二次函数来开始,假设 第k次迭代为:
第k次迭代为:
![\[ m_k(p)=f_k + \nabla f_k^T p+\frac{1}{2} p^T B_k p \qquad\qquad\qquad Equitation 1 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-d1060385dc1a33ec7865560a5fae76ef_l3.png "Rendered by QuickLaTeX.com")
注意 为n x n对称正定矩阵,可以在每次迭代中更新。注意到这个构造函数在p=0的时候,
为n x n对称正定矩阵,可以在每次迭代中更新。注意到这个构造函数在p=0的时候, 和
和 和原函数是相同的。对其求导,得到
和原函数是相同的。对其求导,得到
![\[ p_k= - B_k^{-1} \nabla f_k \qquad\qquad\qquad Equitation 2 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-b49c9e17e378c2745ec30ca957681ed0_l3.png "Rendered by QuickLaTeX.com")
公式2即为搜索方向向量,由此 第k+1次迭代为(其中
第k+1次迭代为(其中 可以用强Wolfe准则来计算):
可以用强Wolfe准则来计算):
![\[ x_{k+1}= x_k + \alpha_k p_k \qquad\qquad\qquad Equitation 3 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-5d87d1796b214da34d89d90747aa6887_l3.png "Rendered by QuickLaTeX.com")
为了不每次都计算(计算太复杂),Davidon提出用最近迭代的几步来计算它。
我们已经计算出,现在构造其在k+1次迭代的二次函数:
![\[ m_{k+1}(p)=f_{k+1} + \nabla f_{k+1}^T p+\frac{1}{2} p^T B_{k+1} p \qquad\qquad\qquad Equitation 4 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-6984d2187c63c5f0b03c9852e3410a09_l3.png "Rendered by QuickLaTeX.com")
怎么求 呢?函数
呢?函数 应该在处和处和目标函数
应该在处和处和目标函数 导数一致。对其求导,并令
导数一致。对其求导,并令 ,即处得:(处自然相等,
,即处得:(处自然相等, )
)
![\[ \nabla m_{k+1}( - \alpha_k p_k )= \nabla f_{k+1} - \alpha_k B_{k+1} p_k = \nabla f_k \qquad\qquad\qquad Equitation 5 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-31e649a173029279a7b1c43d89f60637_l3.png "Rendered by QuickLaTeX.com")
调整方程得:
![\[ B_{k+1} \alpha_k p_k = \nabla f_{k+1} - \nabla f_k \qquad\qquad\qquad Equitation 6 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-4db45036c89babeba307a16076258377_l3.png "Rendered by QuickLaTeX.com")
令 ,方程6为:
,方程6为:
![\[ B_{k+1} s_k = y_k \qquad\qquad\qquad Equitation 7 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-16a47524446a020f8c68cb2b80f1ceda_l3.png "Rendered by QuickLaTeX.com")
令 ,得到另一个形式:
,得到另一个形式:
![\[ H_{k+1} y_k = s_k \qquad\qquad\qquad Equitation 8 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-0d6f3e544c82c49fe67d2691f3f42348_l3.png "Rendered by QuickLaTeX.com")
由此,方程2可以写为:
![\[ p_k= - H_k \nabla f_k \qquad\qquad\qquad Equitation 9 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-15faa30f2e63791ca7b1dce07db6cb2c_l3.png "Rendered by QuickLaTeX.com")
由于我们需要一个比较简单的更新的方法,令:
![\[ B_{k+1}= B_k + E_k , H_{k+1}= H_k + D_k \qquad\qquad\qquad Equitation 10 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-39de6f917f917e77328512c325ab2906_l3.png "Rendered by QuickLaTeX.com")
其中 和
和 为秩1或秩2的矩阵。
为秩1或秩2的矩阵。
令为:
![\[ E_k = \alpha u_k u_k^T + \beta v_k v_k^T \qquad\qquad\qquad Equitation 11 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-702b044e2b7728bb406cc8fcba0327af_l3.png "Rendered by QuickLaTeX.com")
联立方程7,方程10和方程11得:
![\[ ( B_k + \alpha u_k u_k^T + \beta v_k v_k^T )s_k = y_k \qquad\qquad\qquad Equitation 12 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-0c12c30228690068a662e7b5635240bd_l3.png "Rendered by QuickLaTeX.com")
等价于:
![\[ \alpha ( u_k^T s_k ) u_k + \beta ( v_k^T s_k ) v_k = y_k - B_k s_k \qquad\qquad\qquad Equitation 13 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-a12d88b484e83de57c8d40ca2b9cdca0_l3.png "Rendered by QuickLaTeX.com")
通过方程13发现, 和
和 不唯一,令和分别平行于
不唯一,令和分别平行于 和
和 ,即
,即 和
和 ,带入方程11得:
,带入方程11得:
![\[ E_k = \alpha \gamma^2 B_k s_k s_k^T B_k + \beta \theta^2 y_k y_k^T \qquad\qquad\qquad Equitation 14 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-0441bdf028d372c9fec243fcc0e785d0_l3.png "Rendered by QuickLaTeX.com")
把和带入方程13得:
![\[ \alpha ( (\gamma B_k s_k)^T s_k ) (\gamma B_k s_k) + \beta ( (\theta y_k)^T s_k ) (\theta y_k) = y_k - B_k s_k \qquad\qquad\qquad Equitation 15 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-ff38b699c2974b30483427deb538fb58_l3.png "Rendered by QuickLaTeX.com")
整理后得到:
![\[ [ \alpha \gamma^2 (s_k^T B_k s_k) + 1 ]B_k s_k + [\beta \theta^2 (y_k^T s) - 1 ]y_k = 0 \qquad\qquad\qquad Equitation 16 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-42318c26ddc4f1caa2df118d6c209bed_l3.png "Rendered by QuickLaTeX.com")
所以 ,
, ,
,
即 ,
, 。
。
最后联立方程14,代入到方程10得:
![\[ B_{k+1} = B_k - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k} + \frac{y_k y_k^T}{y_k^T s_k} \qquad\qquad\qquad Equitation 17 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-1cceb1e343a1978937fab065edd37652_l3.png "Rendered by QuickLaTeX.com")
用同样的方式可以得到:
![\[ B_{k+1}^{-1} = (B_k - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k} + \frac{y_k y_k^T}{y_k^T s_k})^{-1} \qquad\qquad\qquad Equitation 18 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-9b90290cce22b76e862636f1c7e10d2d_l3.png "Rendered by QuickLaTeX.com")
Sherman Morison Woodbury公式:
![\[ (A + UCV)^{-1} = A^{-1} - \frac{A^{-1}UVA^{-1}}{C^{-1} + VA^{-1}U} \qquad\qquad\qquad Sherman Morison Woodbury Equitation \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-20a3b37384085495ed92451031d4437a_l3.png "Rendered by QuickLaTeX.com")
下面对方程18应用Sherman Morison Woodbury公式:(注意推导中的 是方程中的)(参考文档):
是方程中的)(参考文档):
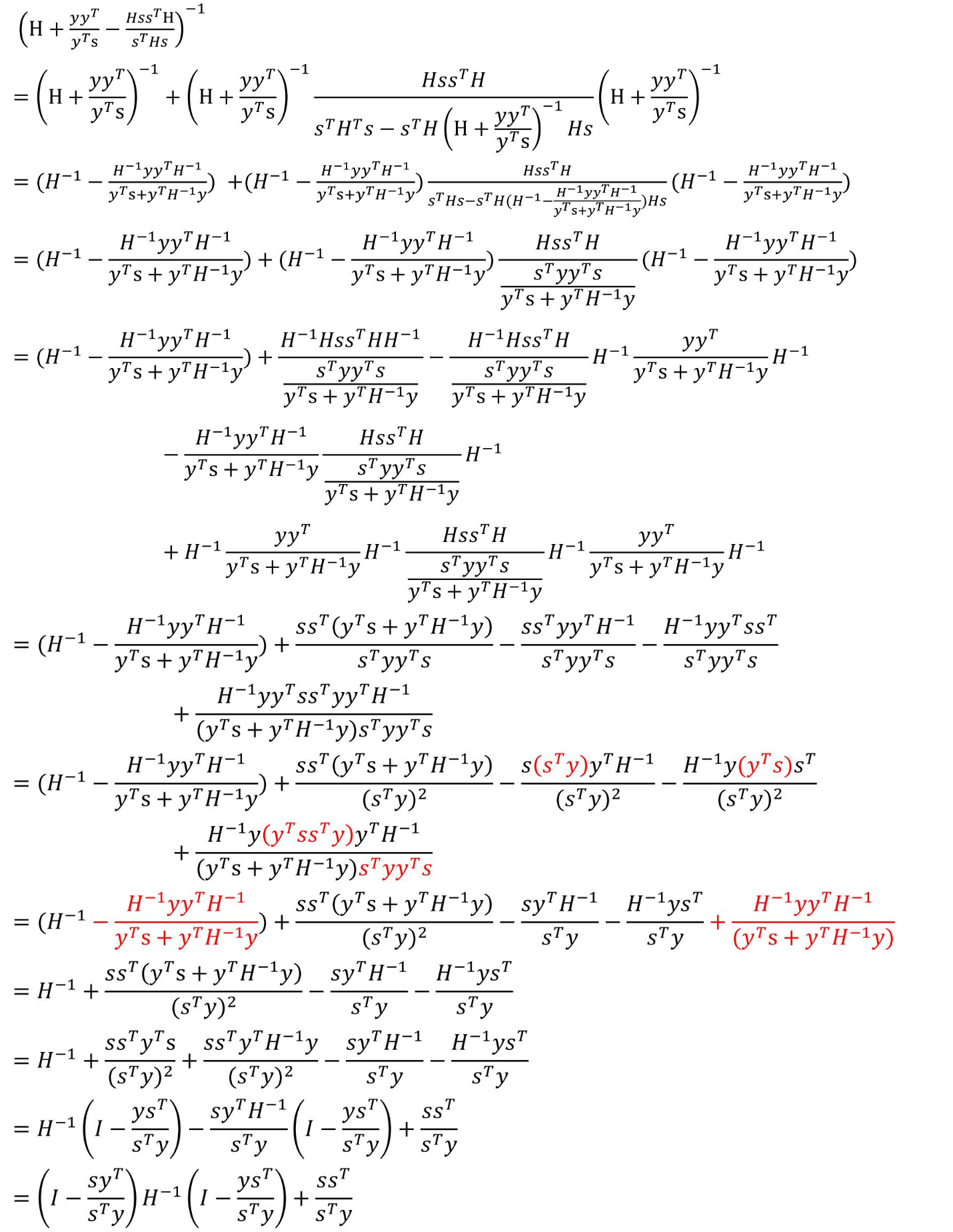
现在我们得到结果:
![\[ B_{k+1}^{-1} = (I - \frac{s_k y_k^T}{y_k^T s_k}) B_k^{-1} (I - \frac{y_k s_k^T}{y_k^T s_k}) + \frac{s_k s_k^T}{y_k^T s_k} \qquad\qquad\qquad Equitation 19 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-96e252069fa2cd4fff3d7bd6db3861d8_l3.png "Rendered by QuickLaTeX.com")
令 ,方程19可得BFGS方法的迭代方程:
,方程19可得BFGS方法的迭代方程:
![\[ H_{k+1} = (I - \rho s_k y_k^T }) H_k (I - \rho y_k s_k^T}) + \rho s_k s_k^T \qquad\qquad\qquad BFGS Equitation \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-1074f808a1ae6215fa48ba562803ae93_l3.png "Rendered by QuickLaTeX.com")
LBFGS方法推导
令 ,则BFGS方程可写成:
,则BFGS方程可写成:
![\[ H_{k+1} = V_k^T H_k V_k + \rho s_k s_k^T \qquad\qquad\qquad Equitation 20 \]](https://liuxiaofei.com.cn/blog/wp-content/ql-cache/quicklatex.com-c514a95ac49f339f139e042444e8c69d_l3.png "Rendered by QuickLaTeX.com")
参考文档
则从k=0开始有:

由上面可见,计算 需要用到
需要用到 组数据,数据量非常大,LBFGS算法就采取只去最近的m组数据来运算,即可以构造近似计算公式:
组数据,数据量非常大,LBFGS算法就采取只去最近的m组数据来运算,即可以构造近似计算公式:

最后Numerial Optimization 这本书给出了LBFGS的双向循环算法:
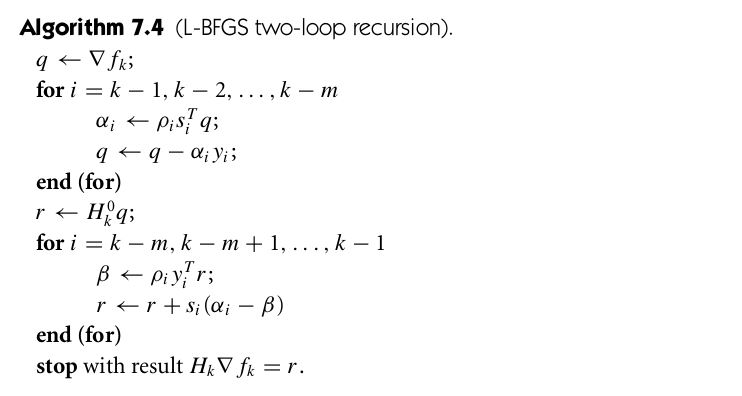
具体实现代码可以参见Breeze LBFGS
最后验证算法对公式22的正确性:参考文档
令 :
:

令 ,这里的m指的是从现在到历史记录m次的后一次,因为LBFGS只记录m次历史:
,这里的m指的是从现在到历史记录m次的后一次,因为LBFGS只记录m次历史:

本作品采用知识共享署名 4.0 国际许可协议进行许可。