原创文章,转载请注明: 转载自慢慢的回味
本文链接地址: Apollo自动驾驶车道检测
本篇以单元测试camera_lib_lane_postprocessor_darkscnn_lane_postprocessor_test.cc的测试camera_lane_postprocessor_point_test为例来分析Apollo自动驾驶怎么进行车道检测。
利用DarkSCNN算法对摄像头拍摄到的路面图片进行预测,来获取车道线在以车辆坐标系下的位置。
 摄像头输出图片
摄像头输出图片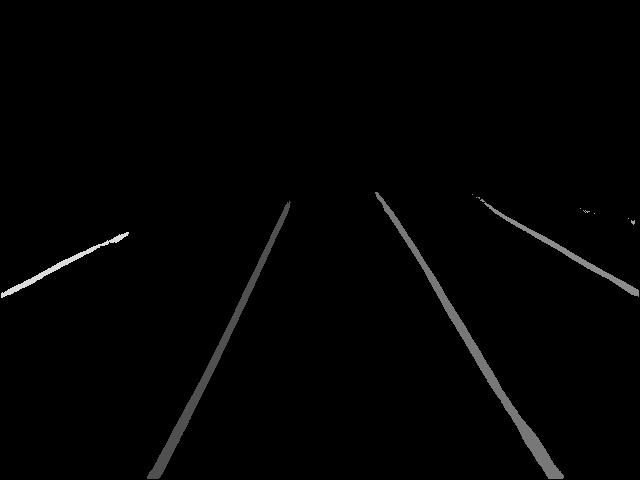 DarkSCNN输出的车道线Mask图
DarkSCNN输出的车道线Mask图 融合到原图上的车道线
融合到原图上的车道线Content:
继续阅读“Apollo自动驾驶车道检测”本作品采用知识共享署名 4.0 国际许可协议进行许可。