原创文章,转载请注明: 转载自慢慢的回味
本文链接地址: ROS导航-MoveBase
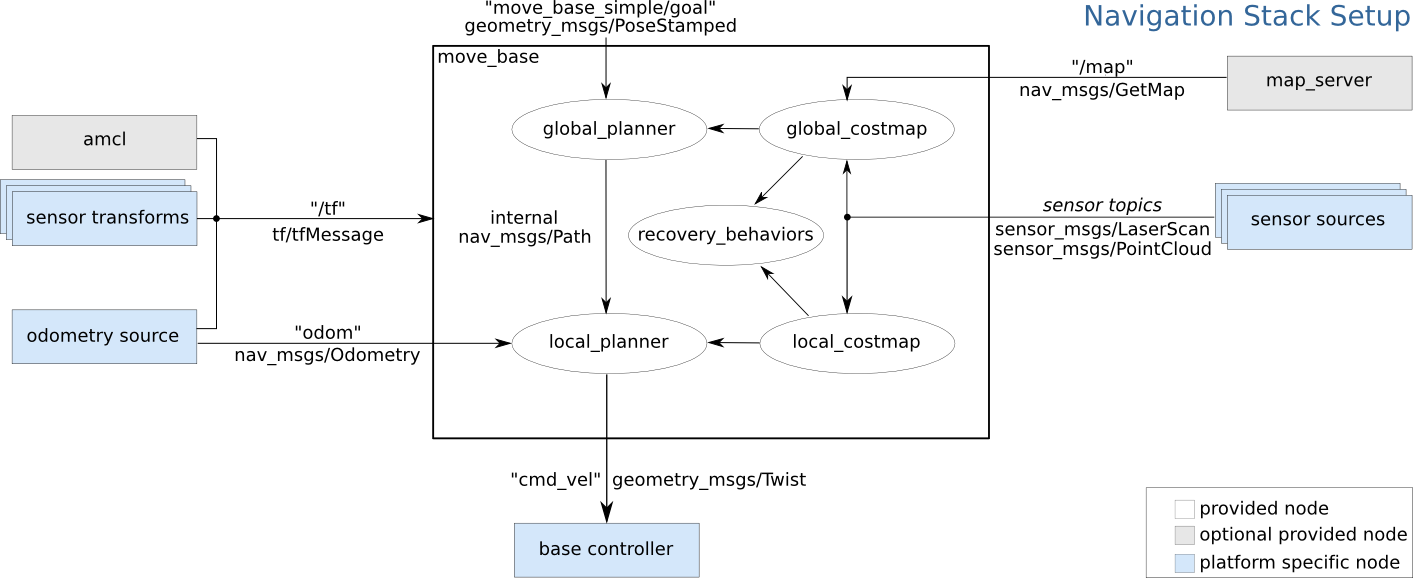
MoveBase包通过全局规划器和局部规划器,利用代价地图costmap来实现当前地点到目标地点的导航。其中,costmap由map和小车传感器共同决定。现在通过对其的源码解读来了解这个框架是怎么完成这个任务的。
1 调用流程
–> MoveBase Node创建:MoveBase::MoveBase(tf2_ros::Buffer& tf)
–> Action server(as_)接收导航目标:void MoveBase::executeCb(const move_base_msgs::MoveBaseGoalConstPtr& move_base_goal)
–> runPlanner_值改变为true,导航线程void MoveBase::planThread()开始调用全局规划器planner_规划全局路径bool MoveBase::makePlan(const geometry_msgs::PoseStamped& goal, std::vector
–> 一旦进入到控制状态CONTROLLING,MoveBase::executeCycle负责调用局部规划器tc_进行局部导航控制
继续阅读“ROS导航-MoveBase”